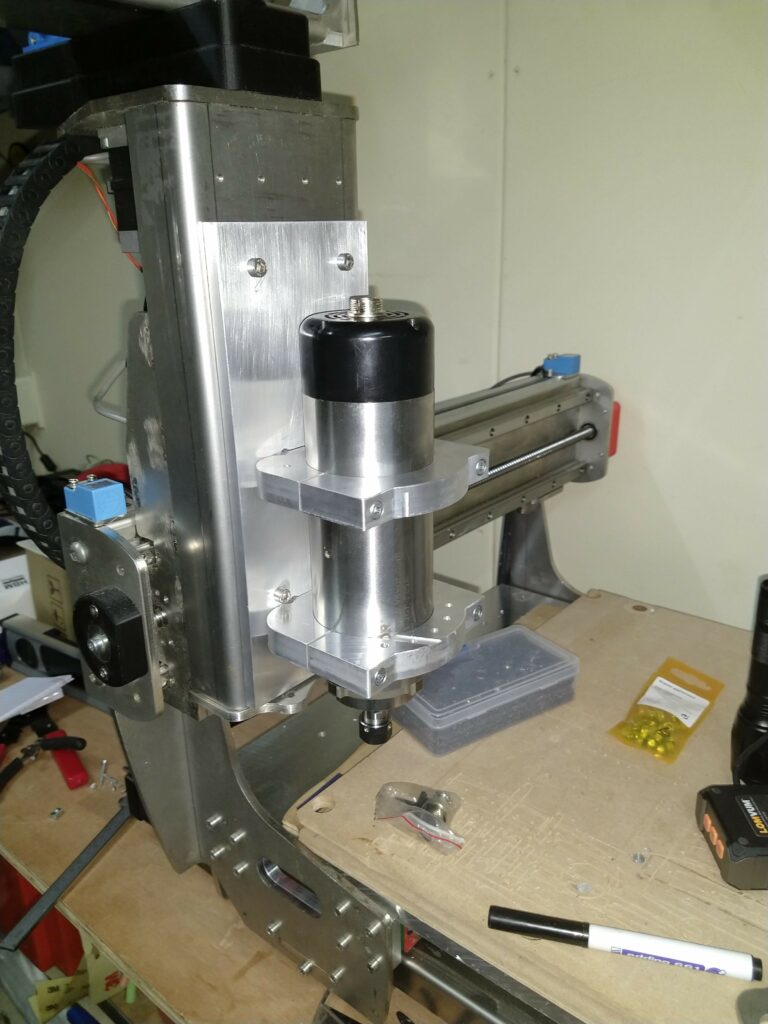
In april 2021 de machine afgerond en in gebruik genomen. Met de kress spindel die ik al had kon ik prima werken. Alleen maakt dat ding zo’n lawaai dat ik toch maar een spindel met hf deel heb gekocht bij ali. Meteen spantangetjes erbij gekocht zodat ik de meeste boortjes en schachtjes kan inspannen: 1 – 8 mm en 1/8″ en 1/4″
De nieuwe machine op zijn plaats en in gebruik genomen.
Het schiet nu toch lekker op. Tijdens de kerstvakantie nieuwe kogelomloopspindels gemonteerd. De 1205 versies bleken krom te zijn en niet goed verder te richten. Nieuwe 1605 spindels besteld en deze gemonteerd.
Nieuwe kogelomloopspindels 1605 gemonteerd. Beide assen worden voorzien van ieder een eigen stappenmotor NEMA 23 1.9 Nm. Duidelijk is ook de synchronisatieriem te zien waarmee de assen met elkaar zijn verbonden, zodat de portal niet scheef getrokken wordt bij stappenverlies.X-as eindschakelaar montage, hier wordt een proximity switch gemonteerd op een geprinte houder.Kabelrups met bekabeling voor de Z-as motor en proximity switches voor Y+ en Y- schakelaar. Je ziet ook de beide stappenmotoren zitten voor de X-as.
De keuze voor het gebruik van de MKS57B motordrivers zullen niet worden gebruikt. De maximale stroom is te beperkt voor de stappenmotors deze is max 2,5 A en bij het testen is gebleken dat de motoren een hogere stroom nodig hebben bij een spanning van 24 V om voldoende power te leveren. In de toekomst worden de motoren met drivers van 4,5 A en een max voedingsspanning van 36 V aangestuurd.
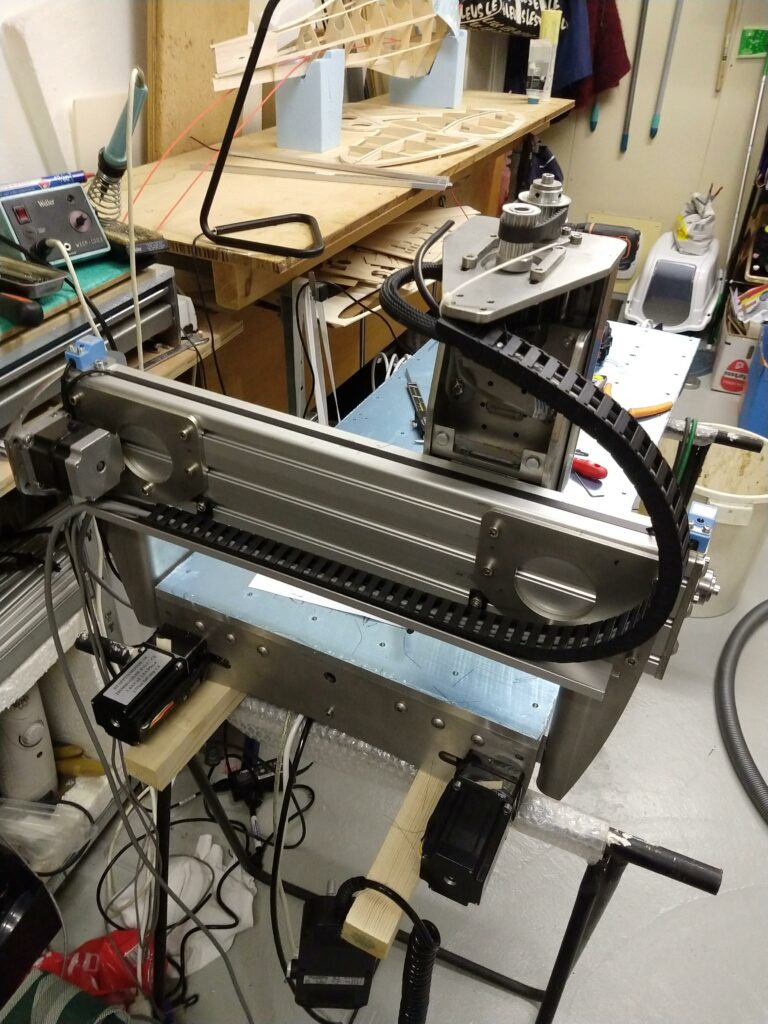
Na de update van april dit jaar is er weer een update :-). Dit keer zijn de X-as spindels aan de beurt en is de tafel voorzien van een aluminium plaat. Deze laatste is 1 cm dik en voorzien van gaten met m6 draad zodat je op de plaat klemmen en andere spullen kunt vastzetten om materiaal vast te zetten om dit te kunnen bewerken.
In bovenstaande foto is duidelijk te zien dat de tandriemwielen zijn aangebracht die zorgt voor de synchronisatie van de beide x-assen. Deze is 850mm echter we hebben in combinatie met de 2 20 tands wielen minder lengte nodig, of we moeten het aantal tanden verhogen. de 850 mm riem wordt met spanners op spanning gebracht en past dan ook op 20 tands wielen. De sanner die de riem op spanning gaat brengen moet nog worden gemaakt en aangebracht. Verder is ook het tafelblad van 10 mm aluminium op de profielen aangebracht. In de profielen zijn sleufmoeren aangebracht waarin 6 mm imbusbouten worden ingedraaid.
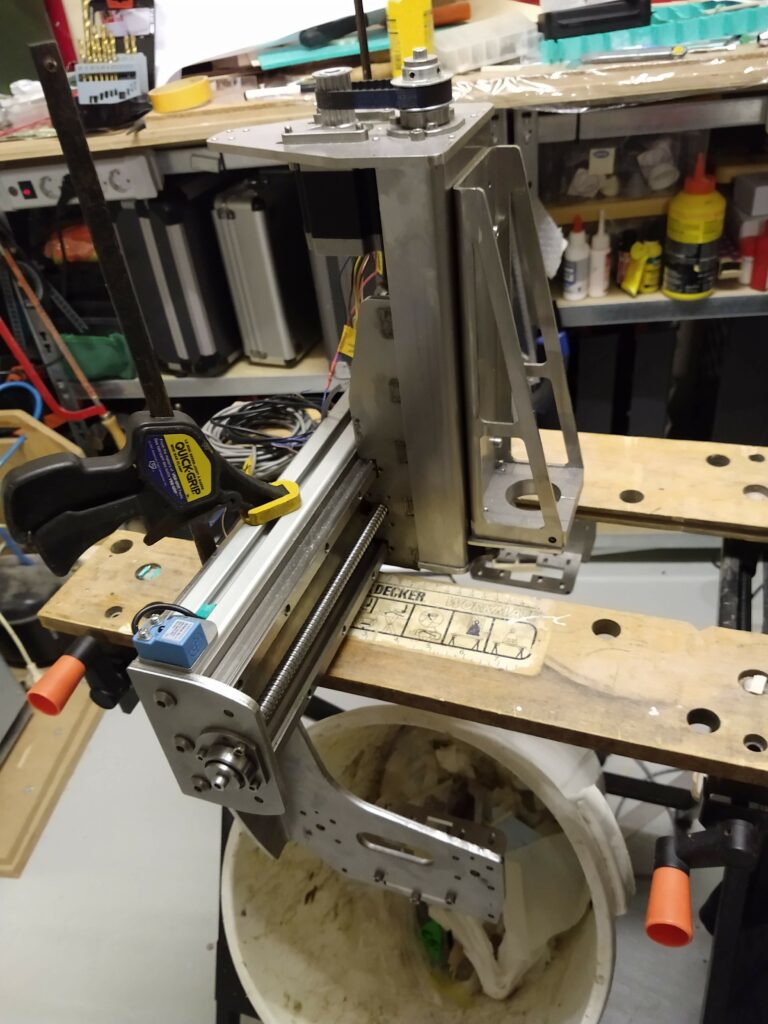
De brug is inmiddels ook onderhanden genomen:
Bekabeling voor de eindschakelaars op de Z-as en de Y-as zitten op z’n plek:
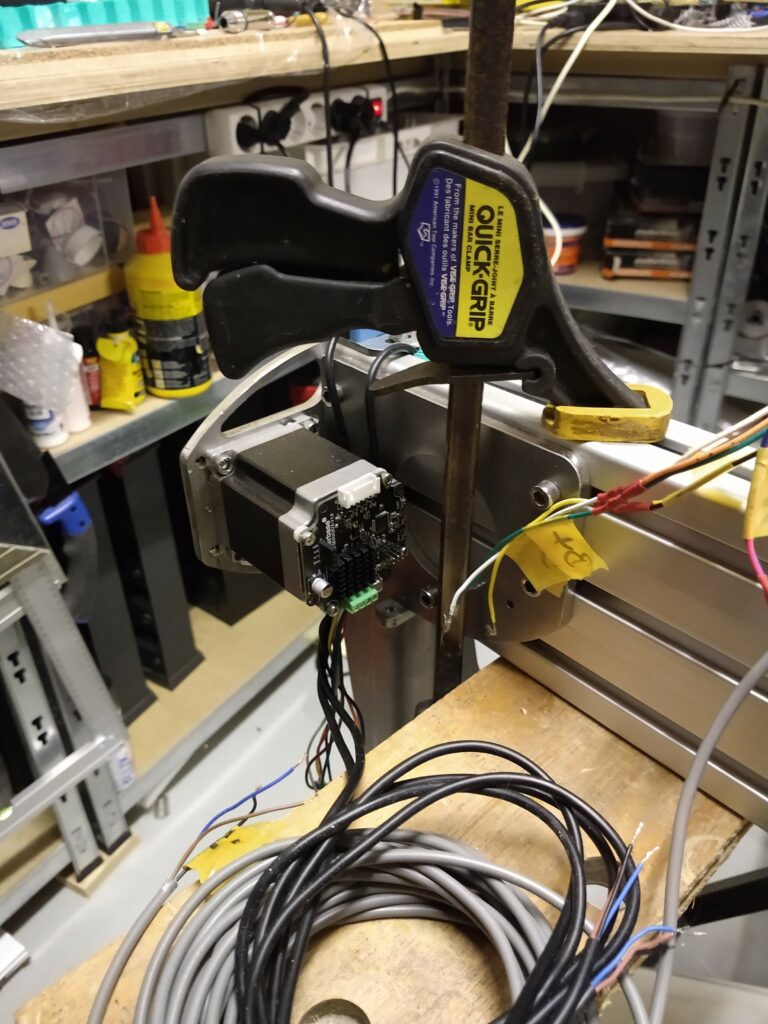
Bekabeling en eindschakelaars Z-asEindschakelaar Y-as bovenop de brug geplaatst.Closedloop stappenmotorcontroller MKS57B
Controller en eindtrap voor de stappenmotoren. Had ik op mijn vorige machine een complete besturing via Zoltar betrokken, wat overigens prima werkte, besloot ik om nu toch eens verder te kijken naar de mogelijkheden. De CNCUSB software van planet-cnc bevalt prima. Deze software is inmiddels ook gepoort op andere platformen dan alleen maar windows. De TPG verie kan ook op windows 10, een raspberry v3 of 4, linux of zelfs apple platform worden gebruikt zie (https://planet-cnc.com/). Omdat ik al over een licentie beschik voor de oudere versie besloten om met CNCUSB verder te gaan. Nadeel is wel dat je software gebruikt die niet verder ontwikkeld wordt. Prima scheelt wel ff een investering van ca. € 225,00 die je besteed aan de software licentie en een Mk 3/4 board. De stappenmotor controllers moet je hier dan nog bij optellen. Deze zijn afhankelijk van je motoren en de stroom van de stappenmotor.
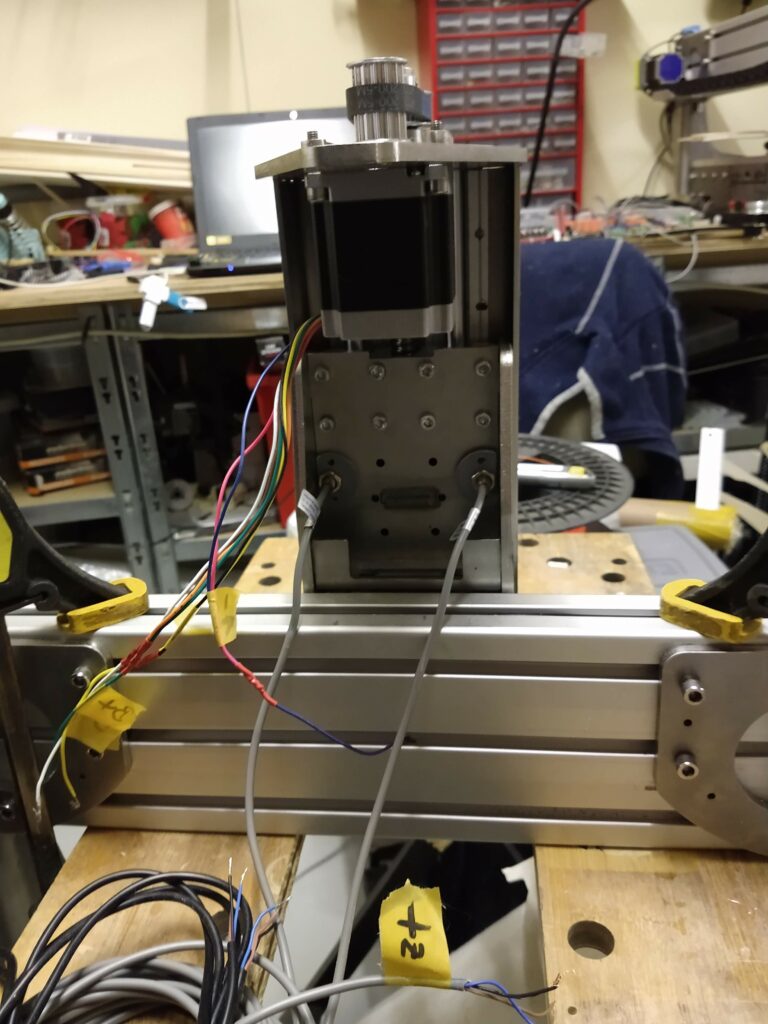
Aangezien ik stappenverlies vervelend vind, ben ik gaan zoeken naar closed loop motoren. Deze kosten via aliexpress zo’n € 100,00 incl controller. Mijn aandacht werd getrokken door Makerbase zij hebben een closed loop alternatief ontwikkeld die gebruikt wordt met een normale stappenmotor. Hierbij wordt een magneetje op de as achterzijde gelijmd. De controllerprint wordt op de achterzijde van de motor geplaatst en heeft 2 stuursignalen (Dir, Pulse) nodig te samen met 24V en 5 V. Hallsensoren op de print detecteren de rotatie en vergelijken dit met de pulsen die gegeven zijn en calculeren met een hoge nauwkeurigheid eventueel stappenverlies en hierop wordt bijgestuurd.
https://nl.aliexpress.com/item/4000165230349.html
Met behulp van een klein OLED display kunnen de controllers worden gekalibreerd en uitgelezen worden. Daarover in later artikeltje meer.
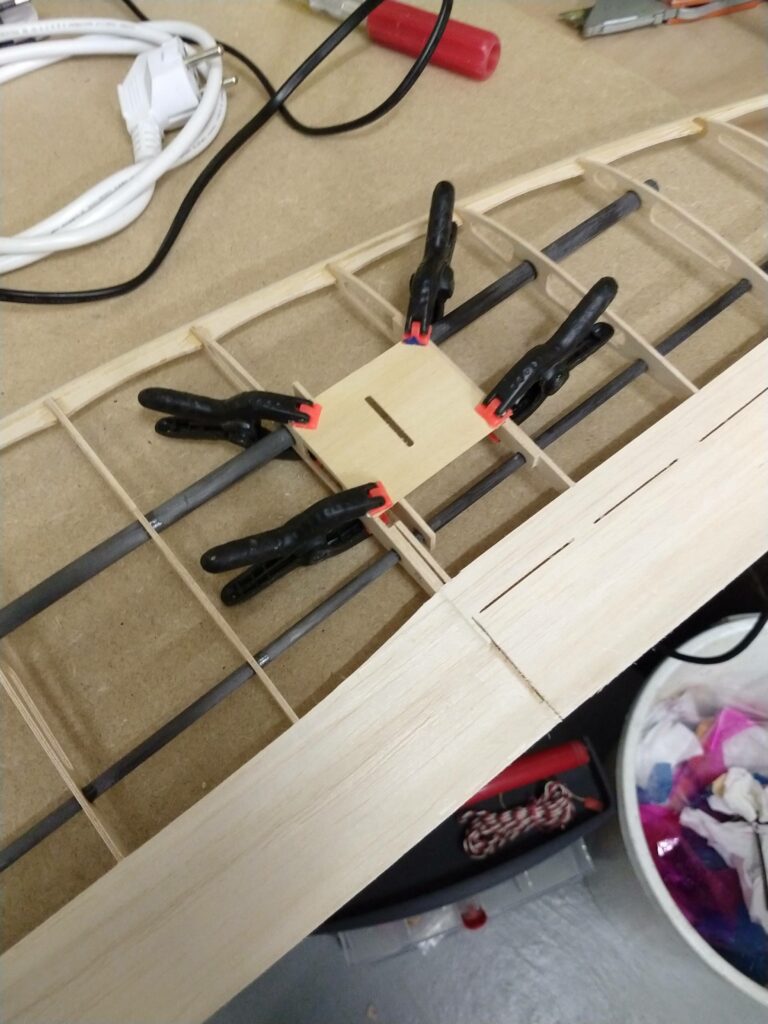
In de afgelopen weken tijdens de lockdown van Nederland door kunnen bouwen aan de Nowa, servo’s inbouwen was nog nodig voordat we aan folieën kunnen denken. Eerst maar eens kijken welke servo’s gebruikt kunnen worden en in de voorraad liggen HXT900 servo’s, deze zouden moeten passen. Met 12 mm inbouwhoogte passen deze servo’s op de toebedachte plaats. De uitsparing in ribbe 8 en 8a iets ruimer maken zodat de servo past. Na het aanbrengen de kabels verlengt en de servo afdekking aan de bovenzijde van de vleugel.
Op de foto is goed te zien dat de roeren nog niet zijn losgesneden. Na de inbouw van de servo’s hebben we de plaats van de roerhoorntjes bepaald zodat deze goed uitgelijnd zijn t.o.v. de servo. De uitslagen zijn max 8 mm up/down. Belangrijkste was om dit mechanisch goed in te stellen. Met de moderne zenders grijpen we veel te snel terug op de mogelijkheid om het nulpunt van de servo te wijzigen en daarmee alles goed op “0”te stellen. Eerst mechanisch instellen en pas tijdens de vlucht evt. trimmen.
Het folieën werd gedaan met oracover en HK folie.
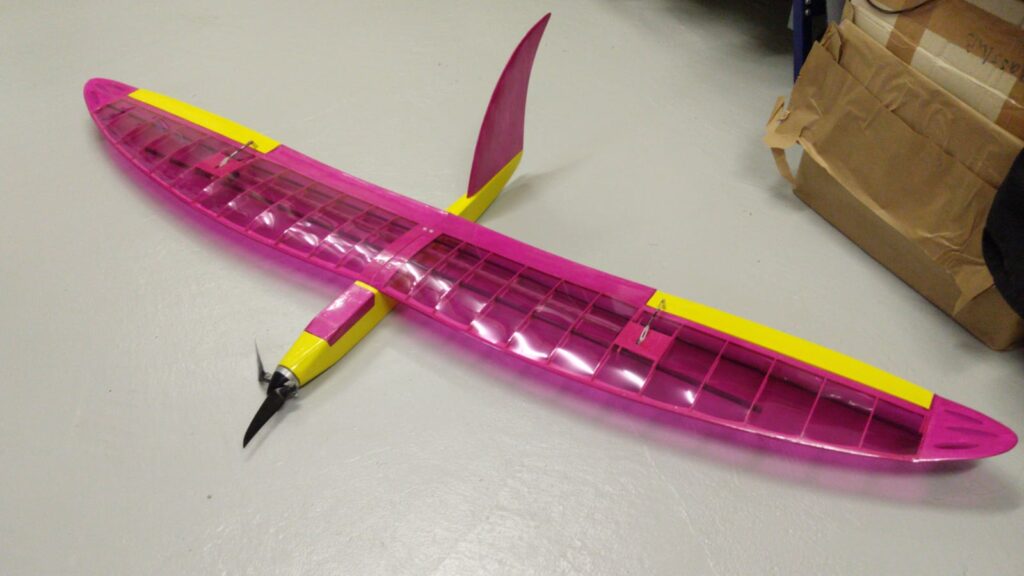
En gefolied…violet en geel.
De vleugel is gefolied met transparante folie van HK. Het geel is oracover. Verschil in verwerken is er eigenlijk niet. Echter als je de folie van H verwijdert blijft een deel van de kleurlaag achter, iets dat je bij Oracover minder is. Het spannen van de vleugelfolie heb ik met een föhn gedaan waarbij de temperatuur in te stellen is. Heel rustig de temperatuur verhogen en dan voorzichtig de folie spannen. Werkt perfect.
Op 9 mei 2020 is het toestel ingevlogen en het vloog direct goed. Trimmen was niet nodig en op de zender had ik expo op 75 en 50 % gezet zodat ook daarmee gespeeld kon worden. De vluchten waar geslaagd.
Nog even de technische details: Motor 2809 1000KV Accu 3s 2200mA Ontvanger Multiplex RX-7 light Servo’s HXT900 Regelaar Turnigy Plush 20A Prop Aeronaut 10 x 6
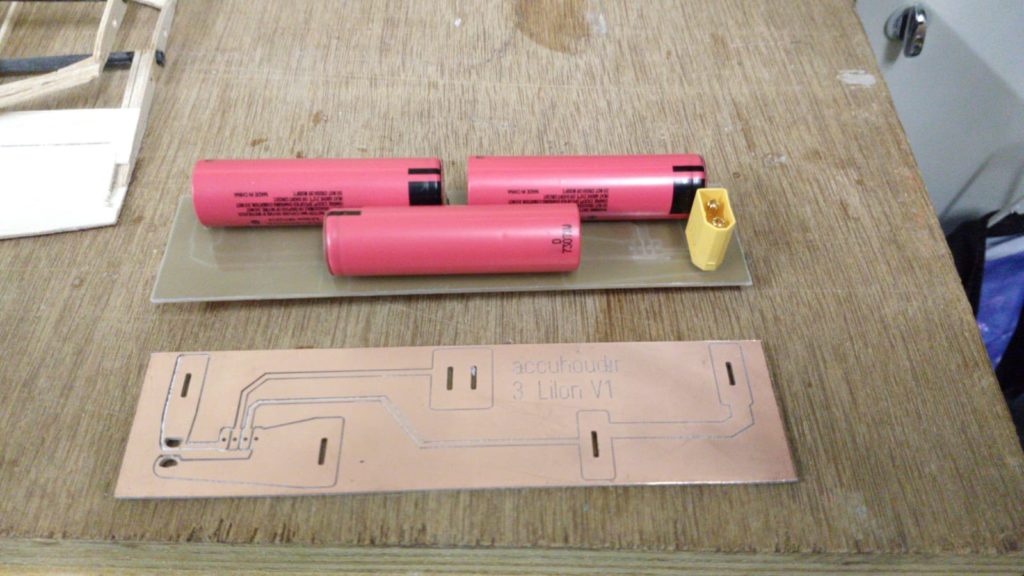
In de voorbereiding voor de Geo Chavez memorial flight in september met de TFA, moesten de gebruikte zenders nog worden voorzien van nieuwe accu’s. Aangezien de beschikbaarheid van de originele NiCd accu’s momenteel best wel lastig is, besloten om Li-Ion cellen in te bouwen. 3 cellen komen op een spanning van 9,9 volt nominaal en een piekspanning van 12,6 V.
Een print gemaakt waarop de accu’s worden gemonteerd met balancer aansluiting en XT60 zodat deze geladen kunnen worden.
En ingebouwd in de FC18 deze versie heeft geen XT 60 aansluiting, de afmeting van de print is 42 x160 mm en past precies in het accuvak. De print is vastgezet met klitteband.